Esquema genérico
Las versiones de PELEA que se han ido implementando difieren en ciertos aspectos de la arquitectura propuesta en el paper original. Las particularidades de estas versiones se tratan en el apartado Ciclo de ejecución.
Conceptualmente PELEA tiene una arquitectura en dos capas, con el alto nivel fundamentalmente deliberativo y el bajo nivel fundamentalmente reactivo, aunque ambos podrían ser deliberativos o reactivos si fuese necesario. Esto presenta la ventaja de que la replanificación en caso de resultados no esperados de las acciones se puede hacer en cualquiera de los dos niveles, dependiendo del tipo de error detectado y de la aplicación. En general, cada una de las dos capas representa un nivel de abstracción distinto. En el caso de aplicación al control de un robot la capa superior se encargaría de las acciones de alto nivel, como ir a una determinada posición, coger algo, etc., mientras la capa inferior se encargaría de descomponer esas acciones en comandos al robot, como girar los motores con una velocidad, mover el brazo un determinado ángulo, etc.
PELEA está compuesta por ocho módulos que se intercambian entre ellos información en forma de ítems de conocimiento. La información intercambiada es:
- estadoL: estado de bajo nivel, generalmente obtenido a través de los sensores.
- estadoH: estado de alto nivel, se crea generalizando o agregando la información contenida en estadoL.
- metas: metas de alto nivel que el sistema debe alcanzar.
- métricas: medidas de rendimiento que se deben tener en cuenta al crear el plan.
- estadoL: estado de bajo nivel, generalmente obtenido a través de los sensores.
- estadoL: estado de bajo nivel, generalmente obtenido a través de los sensores.
- planH: acciones que constituyen el plan a alto nivel que alcanza las metas. Puede ser una secuencia de acciones a realizar consecutivamente o incluir acciones en paralelo.
- planL: acciones a realizar a bajo nivel para ejecutar las acciones de planH. En general cada acción de planH conllevará la ejecución de varias acciones de bajo nivel. Las acciones de planL deberían ser directamente ejecutables por el robot y se suelen denominar comportamientos.
- dominioH: definición (el modelo) de las acciones que se pueden realizar a alto nivel.
- dominioL: definición (el modelo) de los comportamientos que se pueden realizar a bajo nivel.
- ejemplos de aprendizaje: compuestos por problemas, planes generados y resultado de los planes. Constituyen la entrada del módulo de aprendizaje.
- heurísticas: conocimiento que permite al planificador encontrar planes más rápido o con mejor calidad.
- información de monitorización: información que se utiliza para realizar la monitorización de la ejecución del plan. En general está compuesta por un conjunto de variables de bajo nivel y sus rangos de valores permitidos.
Continuar con Módulos de PELEA


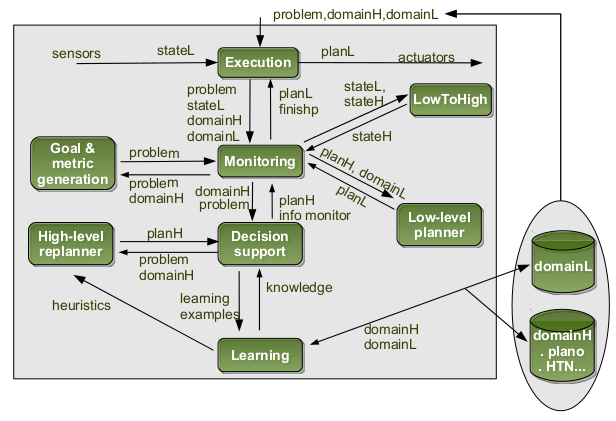 Esquema genérico de la arquitectura.
Esquema genérico de la arquitectura.